




24 kwietnia
|
![Nowoczesny przemysł [część 1]. Inteligentna fabryka, czyli wejście na wyższy poziom świadomości produkcji](https://polskiprzemysl.com.pl/wp-content/uploads/xnowoczesny-przemysl-320x167.jpg.pagespeed.ic.db-XTRkxsG.jpg "Nowoczesny przemysł [część 1]. Inteligentna fabryka, czyli wejście na wyższy poziom świadomości produkcji")
![Nowoczesny przemysł [część 2]. Wszystko zaczyna się od projektowania, czyli jak będzie wyglądać przyszłość rozwoju produktów](https://polskiprzemysl.com.pl/wp-content/uploads/xgeneratywne-projektowanie-320x167.jpg.pagespeed.ic.Ja8x6A51jz.jpg "Nowoczesny przemysł [część 2]. Wszystko zaczyna się od projektowania, czyli jak będzie wyglądać przyszłość rozwoju produktów")






Wiórową obróbkę skrawaniem można sklasyfikować w następujących zabiegach: wiercenie, powiercanie, rozwiercanie, toczenie, wytaczanie, frezowanie, przeciąganie i przepychanie, struganie i dłutowanie.
Zabiegi te można rozdzielić na dwie grupy ze względu na charakter obróbki:
1. Ciągły – wiercenie, powiercanie, rozwiercanie, toczenie, wytaczanie, przeciąganie i przepychanie, struganie i dłutowanie
2. Nieciągły – frezowanie
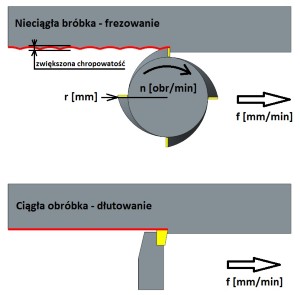
Rys 1. Porównanie metody ciągłej i nieciągłej w obróbce skrawaniem
Obróbka ciągła charakteryzuje się tym, że do wykonania żądanej powierzchni ostrze, raz zagłębione w materiał porusza się po trajektorii cięcia do samego końca uzyskując w ten sposób kształt powierzchni wg kształtu krawędzi tnącej lub sposobu wierszowania ścieżek na powierzchni.
W obecnych obrabiarkach są to trajektorie proste, spiralne lub śrubowe.
Ogranicza to uzyskane powierzchni metodą ciągłą do powierzchni płaskich, cylindrycznych, śrubowych, lub o dowolnych kształtach profilowych (dowolny przekrój przeciągnięty najczęściej po linii prostej).
Dowolne kształty jak np. powierzchnie krzywokreślne uzyskuje się obecnie w obróbce skrawaniem na frezarkach (najczęściej numerycznych).
Metoda takiej obróbki również prowadzi narzędzie po zadanej trajektorii ale jest to narzędzie obrotowe, którego ostrza nieustannie zagłębiają się w materiał i z niego wychodzą kształtując powierzchnię w sposób nieciągły (Rys 1.) Ta nieciągłość znacznie pogarsza chropowatość możliwą do uzyskania w procesie skrawania. Można ją poprawić tylko poprzez zmniejszanie posuwu f narzędzia co wydłuża czas obróbki oraz zwiększanie prędkości obrotowej n narzędzia co ma ograniczenia w postaci maksymalnej prędkości obrotowej wrzeciona obrabiarki lub dopuszczalnej prędkości skrawania Vc po przekroczeniu której ostrze narzędzia ulega szybkiemu zużyciu.
Frezarki w początkowych założeniach były obrabiarkami używającymi narzędzi obrotowych – czyli bazujących na obróbce nieciągłej. Z czasem powstawały najróżniejsze konstrukcje i specjalne oprawki narzędziowe, które umożliwiły mocowanie na frezarkach narzędzi nie obrotowych, jak np. nóż tokarski lub dłuto co umożliwiło wykonywanie na tych obrabiarkach zabiegów z obróbki ciągłej takich jak toczenie, dłutowanie, struganie.
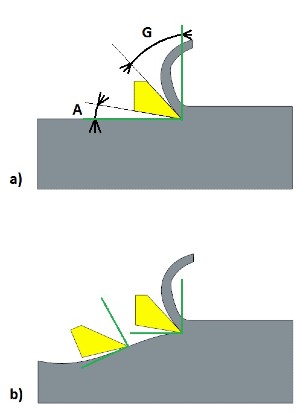
Rys 2. Ciągła obróbka powierzchni a)prostej b)zakrzywionej
Obrabiane w ten sposób powierzchnie mogły być tylko prostymi powierzchniami jak np. płaszczyzna, cylinder, bo jest to niejako aplikowanie na frezarkę istniejących zabiegów obróbki skrawaniem jak toczenie czy dłutowanie.
Głównym ograniczeniem wprowadzenia na frezarkę ciągłego cięcia dowolnych powierzchni krzywokreślnych jest geometria ostrza i jego orientacja względem materiału obrabianego (Rys 2).
Aby zapewnić najlepsze warunki skrawania dla dowolnie zaprojektowanego ostrza należy je utrzymywać jak najbliżej nominalnej wielkości kąta przyłożenia A (Rys 2a) Dlatego do ciągłej obróbki powierzchni krzywokreślnych, kąt ten musi zmieniać się płynnie w czasie obróbki (Rys 2b).
Przy zastosowaniu dynamicznych obrabiarek 5-cio osiowych pojawia się szeroki przedział powierzchni możliwych do wykonania standardowymi narzędziami np. tokarskimi. Są to głównie powierzchnie otwarte ze względu na konieczność rozpędzenia i wyhamowania narzędzia związanymi z minimalną prędkością skrawania Vc.
Metodę ciągłego cięcia powierzchni krzywokreślnych w najprostszych wariantach uruchomić można stosując standardowe techniki programowania w systemie CAM plus drobne korekcje kodu.
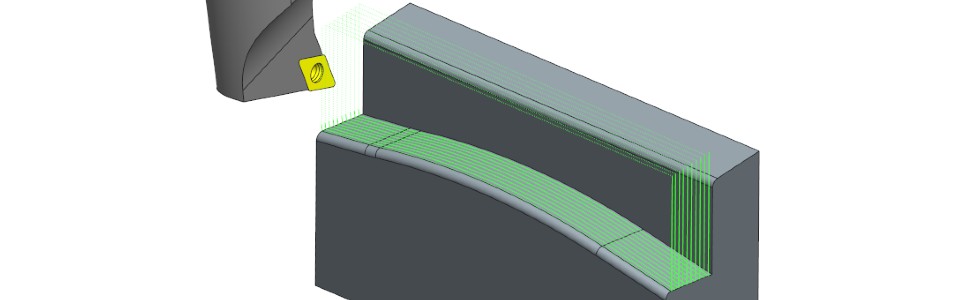
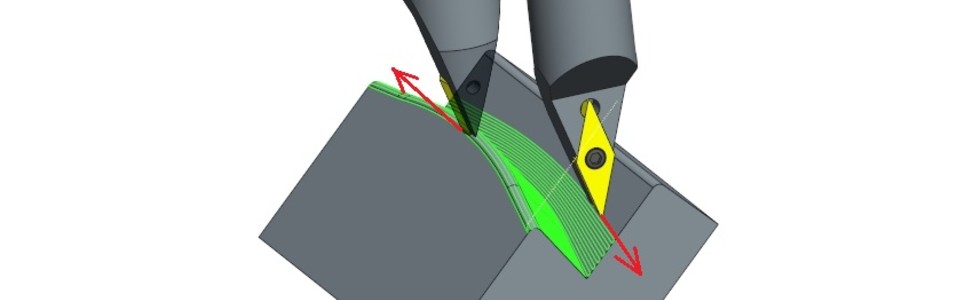
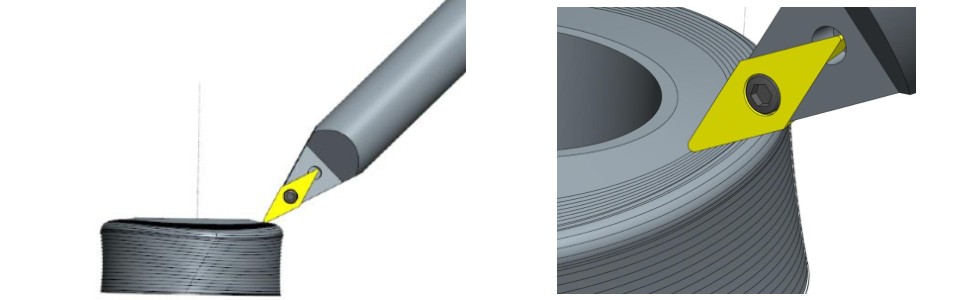
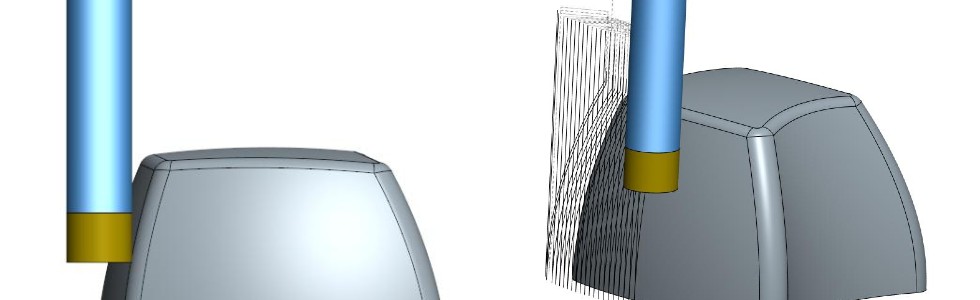
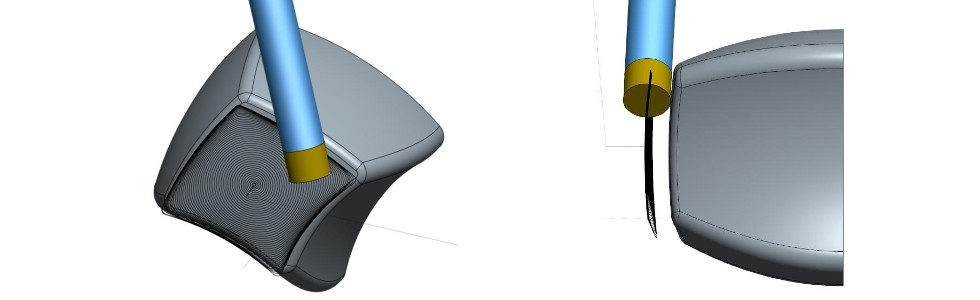
Przykład takiej obróbki ze stałym kątem przyłożenia do obrabianej powierzchni przedstawia Rys. 3. Na Rys 4 i 5 przedstawiono przykładową strategię obróbki z ruchami powrotnymi ze względu na nie osiowy charakter ostrza narzędzia względem osi wrzeciona.
Rys. 3. Kształtowanie powierzchni metodą ciągłego cięcia ze stałym kątem przyłożenia
Rys 4. Przykładowa strategia obróbki z użyciem standardowego wytaczadła tokarskiego

Rys 5. Przykładowa strategia obróbki z użyciem standardowego wytaczadła tokarskiego
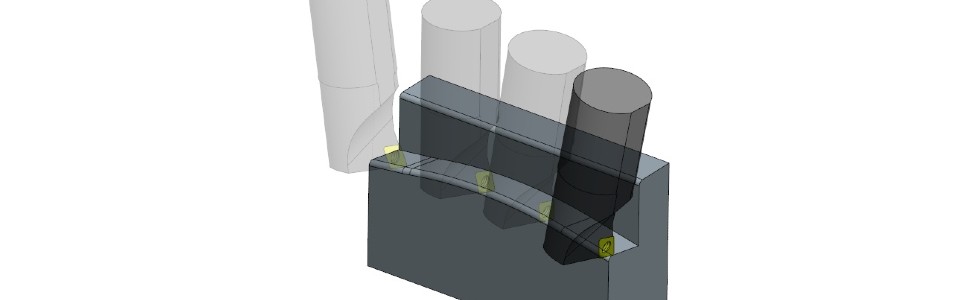
Zakres strategii obróbki można dodatkowo powiększyć używając specjalnych trzonków narzędziowych z wykorzystaniem istniejących na rynku płytek skrawających – zarówno tokarskich jak i frezerskich. Przykład takich narzędzi przedstawiono na Rys 6. Narzędzia takie muszą charakteryzować się odpowiednim usytuowaniem krawędzi tnącej względem osi wrzeciona co umożliwi łatwość programowania w istniejących systemach CAM.
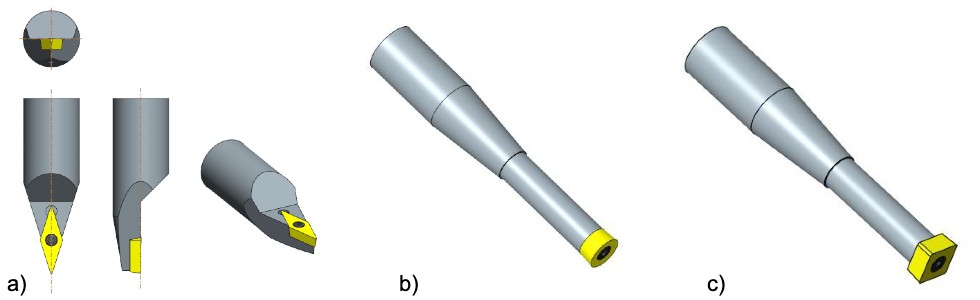
Rys 6. Przykłady narzędzi specjalnych z krawędzią tnącą usytuowaną odpowiednio względem osi oprawki narzędziowej.
a) Centralnie – np. do zastosowania w ścieżkach z CAM jako odpowiednik freza kulistego pracującego prostopadle do powierzchni obrabianej
b) Centrycznie – np. do zastosowania w ścieżkach z CAM jako odpowiednik freza palcowego pracującego narożem (nie wymaga pozycjonowania osi S)
c) Kilkukrawędziowe – przykład narzędzia z centrycznie umieszczoną prostokątną krawędzią tnącą do wykorzystania w obróbce detalu z czterech stron bez konieczności indeksacji osi S
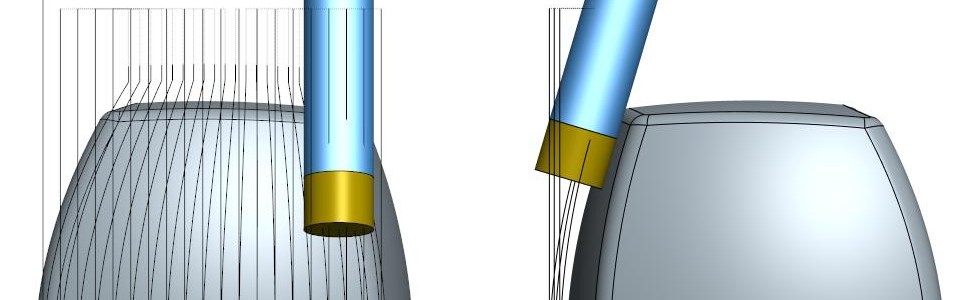
Rozwiązania takie wyeliminują jałowe ruchy powrotne na maszynach wyposażonych w sterowaną oś wrzeciona narzędzia (w co najmniej indeksowany sposób) oraz poszerzą przedział możliwych do obróbki powierzchni. Niektóre ze strategii mogą być uruchamiane również na maszynach bez osi S dzięki zastosowaniu odpowiednio usytuowanej krawędzi tnącej. Przykłady strategii obróbki z zastosowaniem specjalnych narzędzi przedstawiono na Rys. 7 (a,b,c,d,e).
Poniżej przykłady strategii obróbki z zastosowaniem narzędzi specjalnych: Rys. 7 (a,b,c,d,e) ⬇⬇⬇
Rys. 7a) Wykorzystanie standardowej ścieżki CAM dzięki użyciu specjalnego trzonka, który umieszcza krawędź tnącą płytki w odpowiedniej pozycji względem osi wrzeciona. Symultaniczna obróbka 4-ro lub 5-cio osiowa z indeksacją 6-stej osi wrzeciona
Rys. 7b) Wykorzystanie standardowej ścieżki helikalnej ze środowiska CAM w taki sposób, że kąt płaszczyzny przyłożenia ostrza kontrolowany jest np. przez oś uchylną stołu frezarki 5-cio osiowej a odpowiedni kierunek płaszczyzny natarcia do wektora prędkości narzędzia kontrolowany jest poprzez indeksację osi wrzeciona S i symultaniczne sterowanie osią obrotową stołu obrabiarki
Rys. 7c) Przykład obróbki specjalnym narzędziem z wykorzystaniem typowej ścieżki z CAM z płynną kontrolą kąta przyłożenia poprzez 4-tą oś. Konstrukcja narzędzia i zastosowanie odpowiedniej strategii nie wymusza kontroli osi S wrzeciona do ustawienia odpowiedniego kierunku płaszczyzny natarcia względem wektora prędkości narzędzia
Rys. 7d) Przykład obróbki metodą CC specjalnym narzędziem z użyciem strategii 3-osiowej. Wadą takiego podejścia jest brak kontroli kąta przyłożenia
Rys. 7e) Helikalna strategia z płynną kontrolą kąta przyłożenia i odpowiedniego kierunku płaszczyzny natarcia względem wektora prędkości. Dzięki zastosowaniu specjalnego narzędzia płynna kontrola kierunku płaszczyzny natarcia może być realizowana osią obrotową stołu np. C zamiast osią wrzeciona S. Konstrukcja takiego narzędzia sprowadza zagadnienie 6-cio osiowe do zagadnienia 5-cio osiowego
Najszersze zastosowanie metody ciągłego cięcia uzyska się na maszynach 6-cio osiowych o kinematyce trzech osi liniowych XYZ osi uchylnej np. A, osi obrotowej np. C oraz płynnie sterowanej osi wrzeciona, co przedstawiono na rysunku 8. Rozwiązanie takie umożliwi uruchamianie na frezarce dowolnych ścieżek narzędziowych z płynnym utrzymaniem stałego kąta przyłożenia, sterowanego osiami A i C w omawianym przykładzie z maszyną z tzw „kołyską”, oraz odpowiedniego kierunku płaszczyzny natarcia do wektora prędkości V narzędzia sterowanego osią wrzeciona S. Przedstawiono to na rys Rys.9
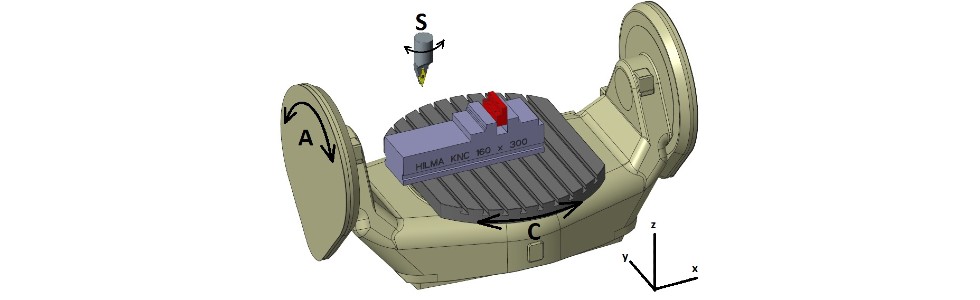
Rys. 8 Przykładowa kinematyka maszyny 6-cio osiowej
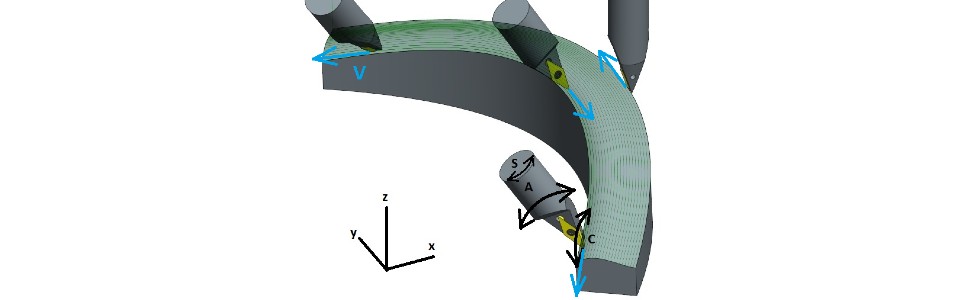
Rys 9. Przykład strategii obróbki ciągłego cięcia z wykorzystaniem obrabiarki 6-cio osiowej
– krótki czas obróbki ze względu na zastosowanie dużych posuwów, które w przypadku klasycznej metody mogą być do kilkudziesięciu razy niższe dla najmniejszych narzędzi.
– bardzo dobra chropowatość, w porównaniu z klasyczną metodą nie posiada składowej od obracającego się narzędzia
– możliwość stosowania naroży o minimalnych promieniach rzędu kilku setnych mm przy jednoczesnym zachowaniu bardzo dużej sztywności, nie do uzyskania w klasycznej metodzie frezowania ostrokątnych naroży na powierzchniach wklęsłych.
– zwiększenie trwałości wrzeciona poprzez zerową prędkość obrotową podczas obróbki
– zastosowanie dużo tańszych ostrzy w postaci gotowych płytek tokarskich lub frezerskich w porównaniu z narzędziami obrotowymi takimi jak monolityczne frezy
– zwiększenie trwałości samego ostrza z tytułu na niską prędkość skrawania, która równa jest posuwowi, w klasycznej metodzie przy większych narzędziach rzędu już kilku mm wychodzi się zawsze z maksymalnej prędkości skrawania a w przypadku małych średnic narzędzi bardzo często prędkość ta ograniczona jest jedynie maksymalną prędkością obrotową wrzeciona co przekłada się na mały posuw (z warunku fz- posuw na ząb)
– konieczność stosowania maszyn 4 i 5-cio osiowych do kształtowania większości powierzchni krzywokreślnych
– ograniczenia obrabianych powierzchni ze względu na rozbieg narzędzia, aby uzyskać minimalną prędkość skrawania potrzebne jest miejsce zanim ostrze wejdzie w materiał (analogicznie sprawa wygląda z wyjściem ostrza z materiału)
– kłopoty z obróbką powierzchni wklęsłych o małych promieniach krzywizn wzdłuż linii cięcia ze względu na gabaryty płytek skrawających
– konieczność stosowania szybkich i dynamicznych maszyn ze względu na prędkość skrawania Vc, która jest równa posuwowi f.
➡ Zobacz FILM z tej metody

![Liderzy polskiego rynku aut dostawczych. Który najlepiej spełni oczekiwania firmy? [RAPORT]](https://polskiprzemysl.com.pl/wp-content/uploads/xCover-320x167.jpg.pagespeed.ic.kqrqKFRnXp.jpg "Liderzy polskiego rynku aut dostawczych. Który najlepiej spełni oczekiwania firmy? [RAPORT]")














![Branża obróbki metali inwestuje w rozwój parku maszyn i urządzeń [RAPORT]](https://polskiprzemysl.com.pl/wp-content/uploads/xobrobka-metali-6-320x167.jpg.pagespeed.ic.4fm7TqTkKv.jpg "Branża obróbki metali inwestuje w rozwój parku maszyn i urządzeń [RAPORT]")


