




14-15 maja
|
![Nowoczesny przemysł [część 1]. Inteligentna fabryka, czyli wejście na wyższy poziom świadomości produkcji](https://polskiprzemysl.com.pl/wp-content/uploads/xnowoczesny-przemysl-320x167.jpg.pagespeed.ic.db-XTRkxsG.jpg "Nowoczesny przemysł [część 1]. Inteligentna fabryka, czyli wejście na wyższy poziom świadomości produkcji")
![Nowoczesny przemysł [część 2]. Wszystko zaczyna się od projektowania, czyli jak będzie wyglądać przyszłość rozwoju produktów](https://polskiprzemysl.com.pl/wp-content/uploads/xgeneratywne-projektowanie-320x167.jpg.pagespeed.ic.Ja8x6A51jz.jpg "Nowoczesny przemysł [część 2]. Wszystko zaczyna się od projektowania, czyli jak będzie wyglądać przyszłość rozwoju produktów")






Spawanie wymaga dużej wiedzy i umiejętności. Liczba profesjonalnych spawaczy jest z roku na rok mniejsza. Zrobotyzowane stanowiska spawania automatyzują proces spawalniczy dla zwiększenia dokładności, bezpieczeństwa pracy oraz skrócenia czasu potrzebnego na wykonanie każdego projektu. Wiele branż wykorzystuje roboty, aby uzyskać zamierzony wynik tak szybko, jak to możliwe.
Dzięki szerokiej gamie urządzeń i oprzyrządowania roboty dostosowują się do wielu różnych procesów spawalniczych, w tym spawanie łukiem ARC, TIG, MIG, zgrzewanie oporowe, punktowe, laserowe oraz innych.
Naprzeciw wyzwaniom stawianym przez przemysł wychodzi oprogramowanie Siemens NX. Zaawansowane narzędzie do planowania-programowania procesów obróbczych. NX CAM to oprogramowanie dzięki, któremu zaprogramujesz ścieżki narzędzia dla maszyn sterowanych numerycznie oraz przeprowadzisz symulację opartą na g-kodzie.
Już nie tylko frezarkę 5-osiową z możliwościami toczenia czy tokarkę wielokanałową z uchylną osią B i przechwytem lub 4-osiową wycinarkę drutową (WEDM). Najnowsza odsłona oprogramowania pozwala programować 6-osiowe roboty przemysłowe.
Rozwój modułu NX CAM Robotics można obserwować od wersji NX 10.0. Narzędzie to służy do offline’owego programowania robotów przemysłowych.
Jeśli użytkownik zna moduł frezowania to jego praca sprowadza się tylko do nałożenia charakterystyki robota na strategię CAM.
Przykładowy proces programowania ścieżki spawalniczej w systemie NX CAM przedstawiamy poniżej:
Wyzwanie: Zaprogramować manipulator 6-osiowy do wykonania procesu spawalniczego
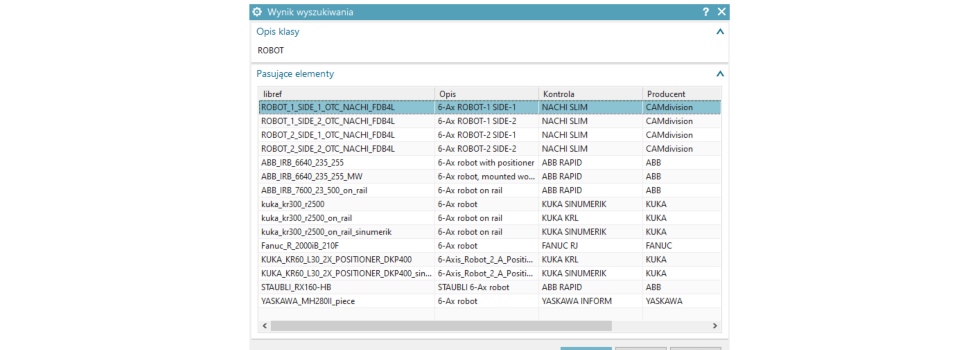
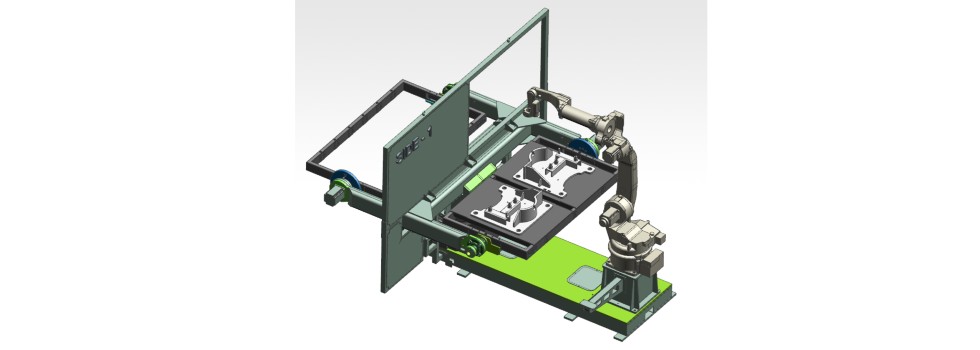
W tym celu pobrać należy z biblioteki odpowiednie środowisko robota (manipulator + cela + oprzyrządowanie)
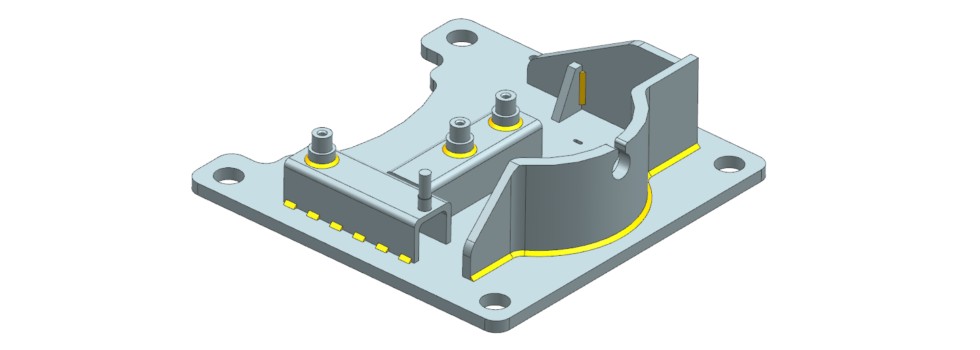
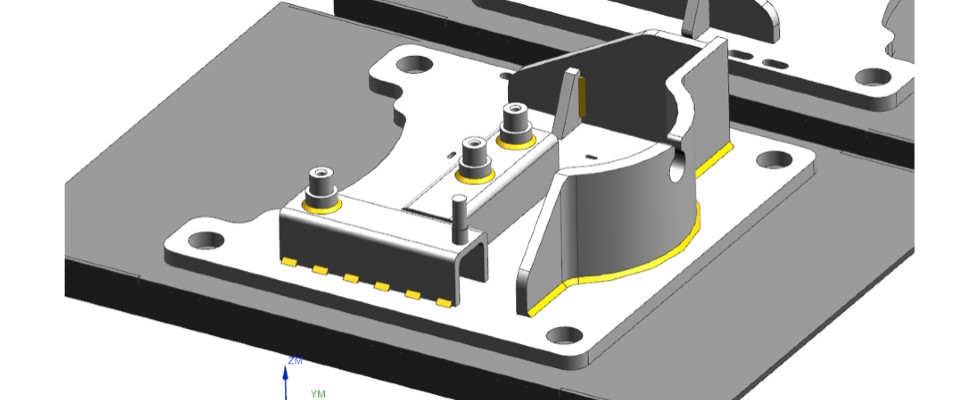
Po jego wczytaniu do systemu należy właściwie umiejscowić detal, który będzie poddany procesowi
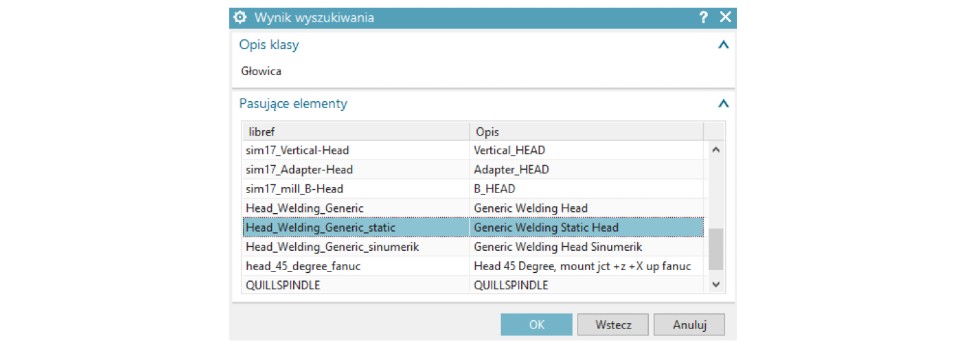
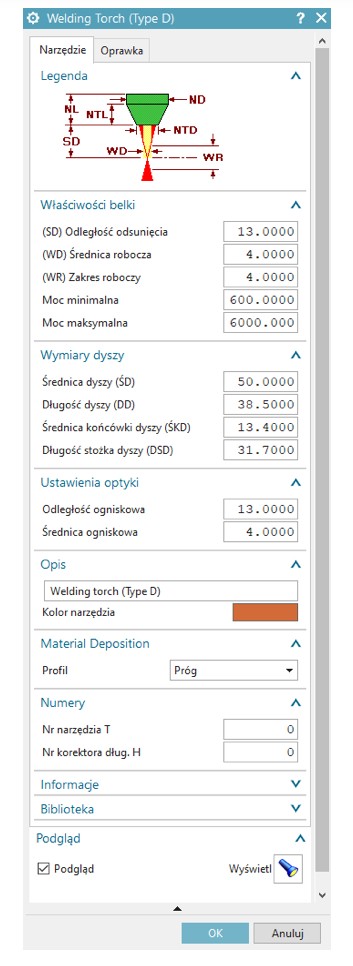
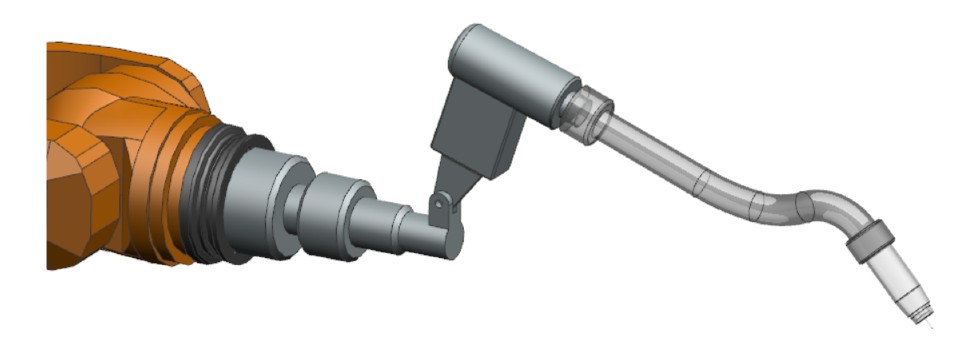
Do spawania użyjemy odpowiedniej głowicy z palnikiem
Zamontowane narzędzie na ostatnim węźle (J6) robota
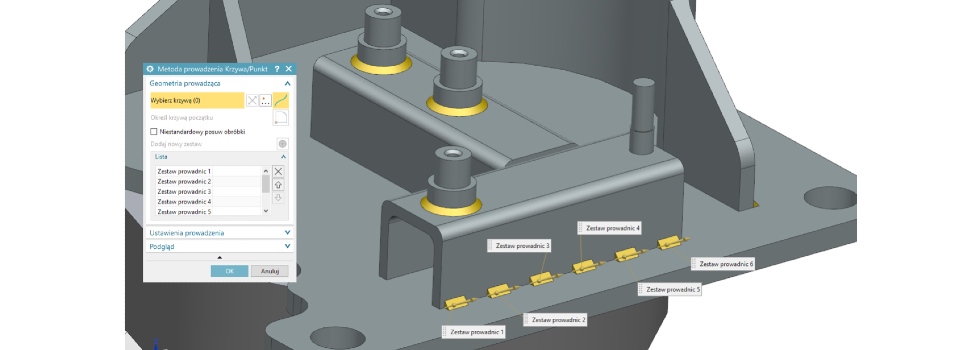
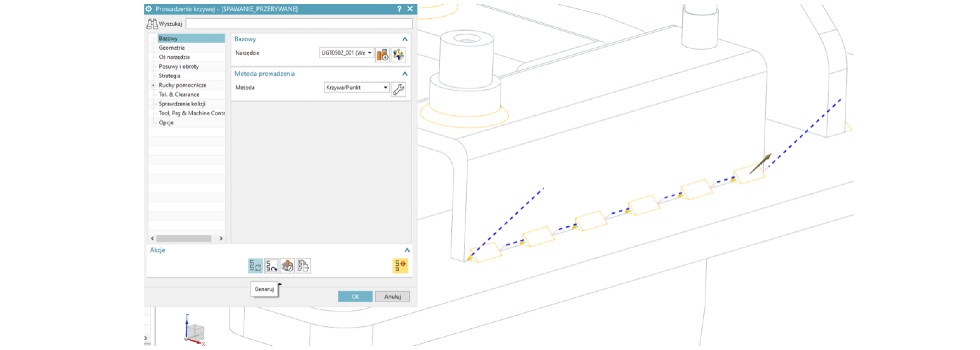
Następnie tworzymy operację CAM. W tym przypadku będzie to spoina pachwinowa przerywana, dlatego używamy operacji opartej o krzywą
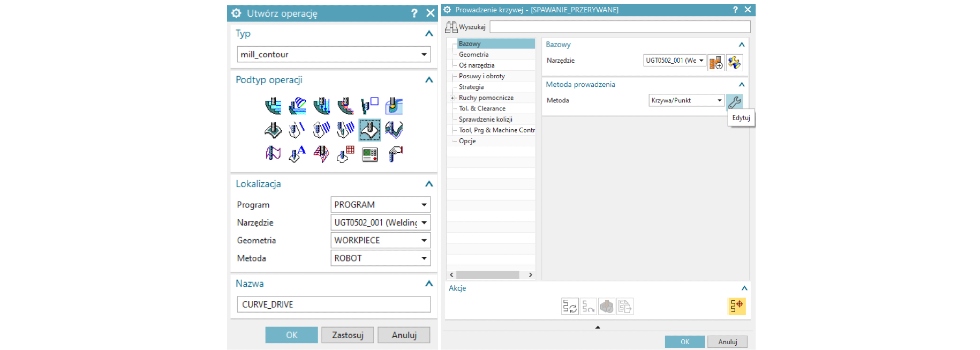
Wskazujemy krzywe
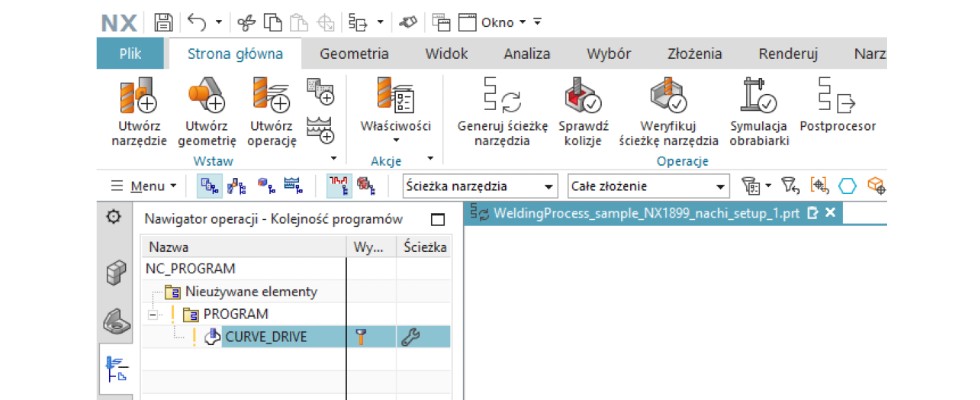
Generujemy ścieżkę na którą zostanie nałożona charakterystyka robota
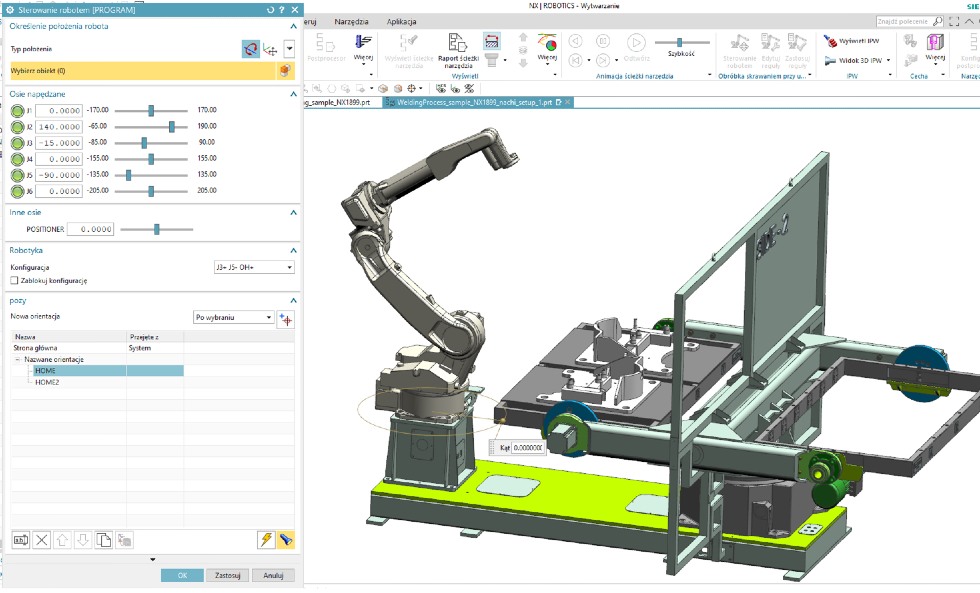
Na pasku znajdują się trzy „magiczne” ikony dotyczące pracy z robotem

W pierwszej kolejności definiujemy pozycje referencyjne (domową, bezpieczeństwa przed czy po procesie) manipulatora
Następnie można przejść do uczenia robota konkretnej operacji CAM
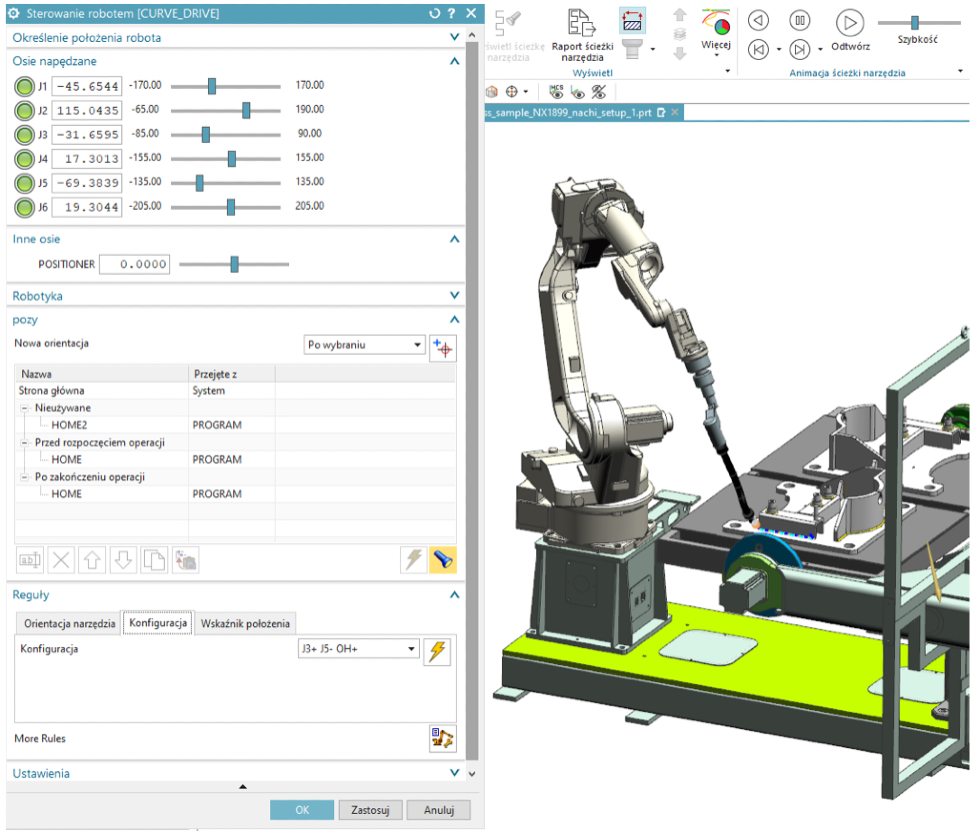
W tym miejscu wybieram konfigurację pracy robota, orientację głowicy z palnikiem i sposób działania zewnętrznej osi (pozycjonera obrotowego)
Po wszystkim wybieramy „Zastosuj reguły”
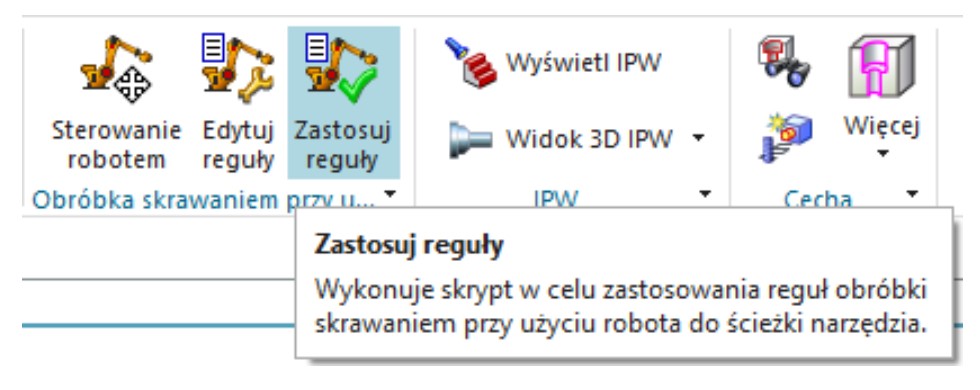
Otrzymujemy komunikat z pytaniem czy chcemy przeprowadzić walidację ścieżki robota
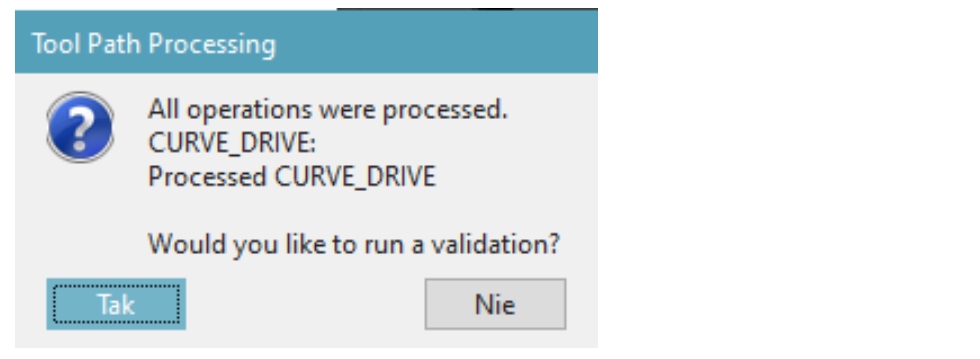
To pytanie jest o tyle istotne, ponieważ dzięki wybraniu opcji „Tak” NX sprawdzi czy podczas pracy robot nie będzie powodował kolizji z detalem lub komponentami robota (osiami), sprawdzi czy nie zabraknie nam zakresu którejś z osi i czy robot może osiągnąć każdą pozycję ścieżki. Ostrzeże również programistę o możliwej „pozycji osobliwej”
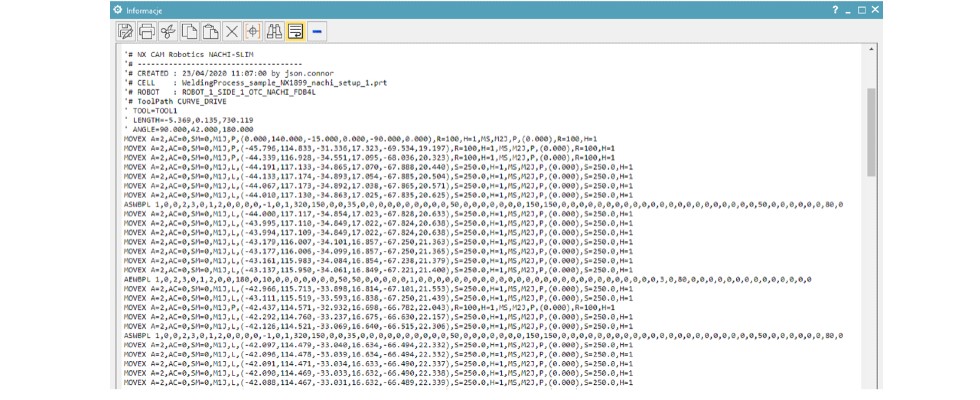
Jeśli wszystko jest dobrze przechodzimy do symulacji oraz generowania kodu na sterownik robota
W ten szybki sposób mamy wykonaną pierwszą spoinę. Pozostało jeszcze tylko 5…

![Liderzy polskiego rynku aut dostawczych. Który najlepiej spełni oczekiwania firmy? [RAPORT]](https://polskiprzemysl.com.pl/wp-content/uploads/xCover-320x167.jpg.pagespeed.ic.kqrqKFRnXp.jpg "Liderzy polskiego rynku aut dostawczych. Który najlepiej spełni oczekiwania firmy? [RAPORT]")







![Branża obróbki metali inwestuje w rozwój parku maszyn i urządzeń [RAPORT]](https://polskiprzemysl.com.pl/wp-content/uploads/xobrobka-metali-6-320x167.jpg.pagespeed.ic.4fm7TqTkKv.jpg "Branża obróbki metali inwestuje w rozwój parku maszyn i urządzeń [RAPORT]")


