




22 kwietnia
|




![Nowoczesny przemysł [część 1]. Inteligentna fabryka, czyli wejście na wyższy poziom świadomości produkcji](https://polskiprzemysl.com.pl/wp-content/uploads/xnowoczesny-przemysl-320x167.jpg.pagespeed.ic.db-XTRkxsG.jpg "Nowoczesny przemysł [część 1]. Inteligentna fabryka, czyli wejście na wyższy poziom świadomości produkcji")
![Nowoczesny przemysł [część 2]. Wszystko zaczyna się od projektowania, czyli jak będzie wyglądać przyszłość rozwoju produktów](https://polskiprzemysl.com.pl/wp-content/uploads/xgeneratywne-projektowanie-320x167.jpg.pagespeed.ic.Ja8x6A51jz.jpg "Nowoczesny przemysł [część 2]. Wszystko zaczyna się od projektowania, czyli jak będzie wyglądać przyszłość rozwoju produktów")


Michał Ciszewski – doktorant z Wydziału Inżynierii Mechanicznej i Robotyki krakowskiej Akademii Górniczo-Hutniczej pracuje nad pionierską konstrukcją, dzięki której powstaje mobilny robot gąsienicowy do prac inspekcyjnych. Jego podstawową zaletą jest umiejętność dostosowania się do zmiennych warunków, występujących w różnego typu rurociągach. Jak dotąd, do zastosowań przemysłowych stosowano inne roboty w rurociągach poziomych, a inne w pionowych. W tym drugim przypadku oferowanych na rynku rozwiązań jest bardzo niewiele.
Rurociągowiec tworzony na AGH może poruszać się zarówno pionowo, jak i poziomo – obie te czynności jest w stanie wykonywać na jednej konstrukcji. W ten sposób prototyp nie tylko rozwiązuje konkretny problem, związany z inspekcją wizyjną rurociągów, ale także czyni to za pomocą jednej, uniwersalnej maszyny.
– W ramach pracy magisterskiej wykonałem projekt mechaniki całego układu, zaprojektowałem, jak on ma działać i wykonałem dokumentację, natomiast priorytetem mojego doktoratu jest opracowanie prototypu i układu sterowania, wraz z modelowaniem matematycznym i symulacjami, tak żeby robot mógł dostosowywać się do pracy w różnego typu rurociągach – mówi Michał Ciszewski. I dodaje: – Obecnie udoskonalamy prototyp, zmieniamy układ sterowania, udoskonalamy zasilanie, komunikację i układy sensoryczne, dlatego dzięki tym pracom robot będzie lepiej przystosowany do pracy w warunkach typowo przemysłowych.
Obecnie młody naukowiec i Wydział Inżynierii Mechanicznej i Robotyki na którym pracuje poszukuje inwestorów, zainteresowanych komercjalizacją projektu i związaną z tym faktem produkcją rurociągowca. Jednocześnie kontynuuje prace, dotyczące dalszego polepszenia parametrów automatyki robota, jego ruchu i wykonywania zadań inspekcyjnych. W fazie projektu są również gąsienicowe moduły napędowe, za pomocą których urządzenie stanie się jeszcze bardziej mobilne i funkcjonalne.
Z tego względu, że tworzony na AGH robot wyposażony jest w kamerę wizyjną, to jego głównym zadaniem będzie możliwość dostosowywania się urządzenia do różnego typu rurociągów i środowiska pracy. Dzięki temu pozwalać będzie zarówno na inspekcję rurociągów o przekroju okrągłym, jak i kwadratowym, o bardzo różnej średnicy. Poruszać się będzie zarówno po płaskiej powierzchni, w ograniczonym zakresie po nierównym terenie, jak i w rurach pionowych. Nowe urządzenie jest w stanie pracować w różnych typach rurociągów o średnicach poziomych od 210 mm (wewnętrznej) do kilkuset mm. W przypadku rur pionowych zakres ten wynosi od 225 do 270 mm. Istnieje tez możliwość zastosowania robota w rurach o większej średnicy. Może także pracować w środowisku wodnym.
Konstruowany przez Michała Ciszewskiego rurociągowiec objęty jest patentem. Jak wynika z „Opisu patentowego Urzędu Patentowego Rzeczpospolitej Polskiej”: „zaletą wynalazku jest możliwość wszechstronnego zastosowania jednostki mobilnej, zwłaszcza robota mobilnego do poruszania się po powierzchniach płaskich i wewnątrz przewodów rurowych. Zastosowanie różnego rodzaju napędów (np. serwomechanizmów) do zmiany pozycji układu napędowego pozwala na automatyczne dostosowanie się pojazdu do przestrzeni roboczej podczas pracy.
Przyjmując konfigurację bazującą na dwóch pedipulatorach uzyskuje się efekt dostosowania robota mobilnego do poruszania się po powierzchniach płaskich albo wewnątrz przewodów rurowych o dowolnej orientacji również poziomej lub pionowej.”
Jest tak dlatego, że konstrukcja rurociągowca działa w oparciu o system ośmiu napędów. – Dwa spośród nich to moduły gąsienicowe (to jedyna część zakupiona bezpośrednio od kanadyjskiego producenta tego typu modułów), natomiast reszta konstrukcji mechanicznej została zaprojektowana przez zespół z AGH. Pozostałe sześć napędów to serwomechanizmy, które pozwalają na ustalanie pozycji tzw. pedipulatorów, które odwzorowują działanie kończyny dolnej człowieka – opowiada o tworzonej przez siebie technologii Michał Ciszewski. – W naszym robocie gąsienice można uznać za stopy, a teraz chcemy dostosować docisk stopy do ściany rurociągu i odległość od korpusu robota. Robot ma dwa niezależnie sterowane pedipulatory, a każdy z nich ustawia pozycję i orientację gąsienicy względem korpusu.
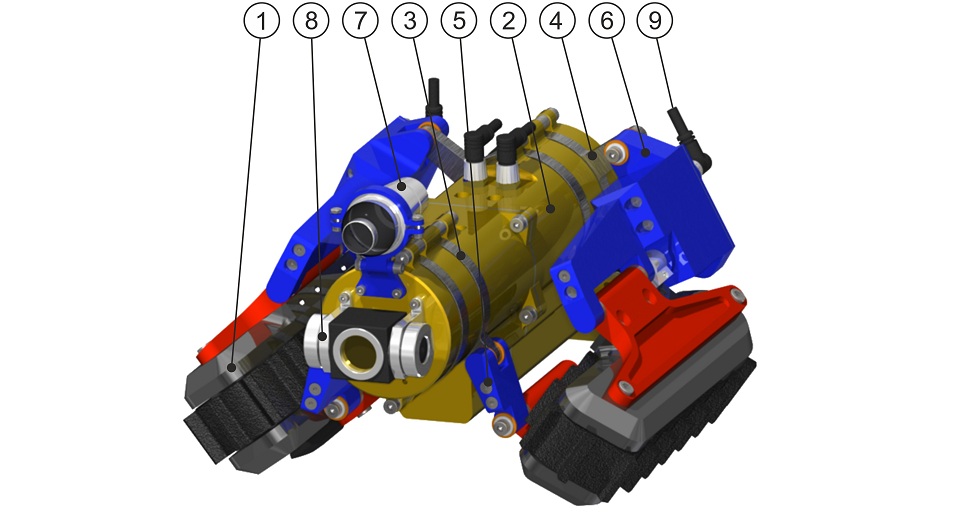
Fot. AGH / Model 3D: 1 – gąsienicowy moduł napędowy; 2 – korpus; 3 – przedni pierścień obrotowy; 4 – tylny pierścień obrotowy; 5 – ramię przednie; 6 – ramię tylne; 7 – kamera; 8 – oświetlenie; 9 – złącze wodoszczelne
Innowacyjne pojazdy z AGH
Dzięki posiadaniu takich możliwości poruszania się wewnątrz różnego typu rurociągów, nowy robot będzie w stanie w pełni funkcjonalnie sprawdzać ich stan techniczny. Ma to o tyle znaczenie, że bardzo często ze względu na m.in. małą średnicę rur, lub też znajdujące się wewnątrz zabrudzenia, dostęp do nich jest znacznie utrudniony. Jak dotąd stosowane są roboty, które właściwie spełniają swoją funkcję jedynie w poszczególnych elementach rurociągu. Teraz – dzięki konstrukcji z AGH – będzie można w pełni zobaczyć jego wnętrze. W ten sposób trzy główne problemy, które występują w rurociągach: korozja, uszkodzenia przy łączeniach rur, a także ich rozgałęzieniach, będą łatwo diagnozowalne i w pełni widoczne.
Prace nad tego typu technologiami realizowane już były na Wydziale Inżynierii Mechanicznej i Robotyki AGH. Dotychczas jednak koncentrowały się one na rozwiązaniach, które umożliwiały robotom poruszanie się przede wszystkim w rurach pionowych – i to gównie tych, gdzie powierzchnia jest w miarę równa. Teraz, dzięki bogatemu wyposażeniu, którego elementami są m.in. zminiaturyzowany układ sterownika o zaawansowanej konstrukcji (obsługujący jednocześnie osiem napędów), czujnik inercyjny, kamera CCTV z dodatkowym oświetleniem (jej zadaniem jest ocena wizualna stanu technicznego rurociągu w czasie rzeczywistym), czujnik umożliwiający pomiar natężenia prądu na każdym z napędów – będą one znacznie bardziej mobilne.
Rurociągowiec nie jest jedynym nowatorskim pojazdem mechanicznym, który tworzony jest obecnie na AGH. W ostatnich dniach uczelnia poinformowała, że jej studenci rozpoczęli budowę terenowego motocykla elektrycznego. Planują oni wystartować w lipcu tego roku w zawodach SamrtMoto Challange w Barcelonie. Jak informuje AGH: „Największym atutem powstającego motocykla będzie elektryczny napęd. Specjalne baterie oraz silnik o mocy 8 kW, umieszczony w tylnym kole, pozwolą uzyskać prędkość do 120 km/h. Dodatkowym atutem będzie wbudowany komputer pokładowy wyświetlający parametry jazdy oraz stan baterii. Poza tym studenci planują wyposażyć pojazd w testowane na AGH superkondensatory umożliwiające magazynowanie energii podczas hamowania.”
Prace nad jednośladem prowadzone są równocześnie w trzech kołach naukowych. Projekt koordynowany jest przez Studenckie Koło Naukowe Mechaników z Wydziału Inżynierii Mechanicznej i Robotyki. Studenci z Koła Naukowego Hydrogenium opracowują specjalne baterie litowe, a członkowie Koła Naukowego Telephoners konstruują system do rejestracji parametrów pojazdu.
Patent na technologię
AGH znajduje się w czołówce polskich uniwersytetów, pod względem ilości tworzonych rozwiązań technicznych i otrzymywanych patentów, a także chronionych prawem wzorów użytkowych. Tylko w 2016 roku było ich 134. – Różnorodność uzyskiwanych patentów pokazuje jak wszechstronną uczelnią jesteśmy. Wśród otrzymanych patentów mamy m.in. urządzenie do pionizowania osób niepełnosprawnych, sposób otrzymywania resorbowalnych implantów do leczenia ubytków kostnych czy układ chłodzenia ogniw paliwowych w bezzałogowych samolotach o napędzie śmigłowym. W zeszłym roku patenty uzyskały również takie oryginalne rozwiązania jak na przykład zestaw sprężysty do narty alpejskiej czy stacja ekranowa do wizyjnej kontroli przednich świateł samochodowych – wymienia prof. Jerzy Lis, Prorektor ds. Współpracy AGH.
Jednocześnie cały czas realizowane są kolejne prace badawcze. Na początku roku kolejne trzy projekty AGH uzyskały dofinansowanie ze środków Narodowego Centrum Nauki. Na łączną sumę 3.629.100 zł wsparte zostały projekty: „Wyjaśnienie mechanizmów generowania, migracji i mieszania gazu ziemnego na przykładzie akumulacji w utworach górnego paleozoiku basenu górnośląskiego i lubelskiego oraz miocenu zapadliska przedkarpackiego na podstawie jego składu trwałych izotopów C, H, N, Ne, He, Ar, Kr i Xe, geochemicznej charakterystyki skał macierzystych (eksperymenty pirolizy wodnej i zestaw analiz) i warunków geologicznych”, „Wielofunkcyjne cementy kostne w oparciu o poliuretanosacharydy z kontrolowaną temperaturą sieciowania”, „Badania nad metodami pomiarów i projektowaniem biofunkcjonalizowanych układów mikrofalowych tworzących sensory mikrobiologiczne”. Dzięki temu, uczelnia wypracować będzie mogła kolejne, ważne również dla przemysłu, rozwiązania techniczne.

![Liderzy polskiego rynku aut dostawczych. Który najlepiej spełni oczekiwania firmy? [RAPORT]](https://polskiprzemysl.com.pl/wp-content/uploads/xCover-320x167.jpg.pagespeed.ic.kqrqKFRnXp.jpg "Liderzy polskiego rynku aut dostawczych. Który najlepiej spełni oczekiwania firmy? [RAPORT]")











